News

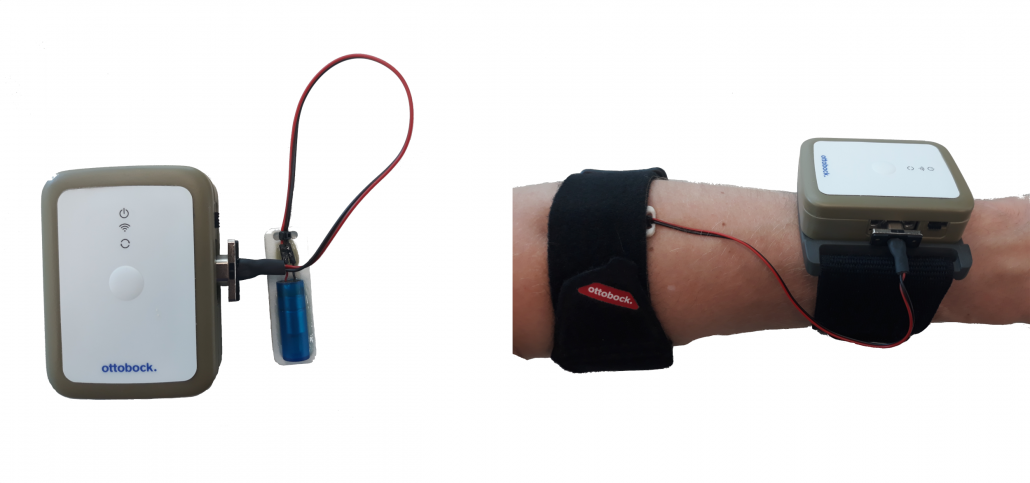
Spexor Monitoring system with sensory feedback capabilities
The Spexor Monitoring system fuses the sensor information from inertial measurement units (IMU) and force insoles to allow a biomechanical and ergonomical analysis of posture. The system can recognize when the user is doing an unergonomic movement and feedback this back to the user. This way the user can correct the posture or avoid such movements in the future.

Low-level controller of active spinal exoskeleton
Which is the best way to control a wearable robot? The answer to this question is heavily dependent on 3 main factors: the mechatronic hardware chosen by the designers, the tasks where the robot needs to assist (bending forward, lifting, >0 trunk angle static postures,…), and the tasks where the user needs to be free of the exoskeleton’s intervention (walking, stair climbing, sitting…). In SPEXOR we are exploring different types of control modes and capabilities that are unique among the state of the art devices.
Active spexor prototype development
While passive lower back support exoskeletons might be simpler, cheaper and less prone to error, they also lack versatility. An active exoskeleton on the other hand has the potential to dynamically adjust the support as needed. To explore these active options, two active exoskeletons are being built – one hydraulically and one electrically actuated. By exploring different technologies, a wider set of actuation options can be tested and validated, potentially leading to prototype combining the best of both technologies.