News

Biomechanical requirements for passive spinal exoskeleton are defined
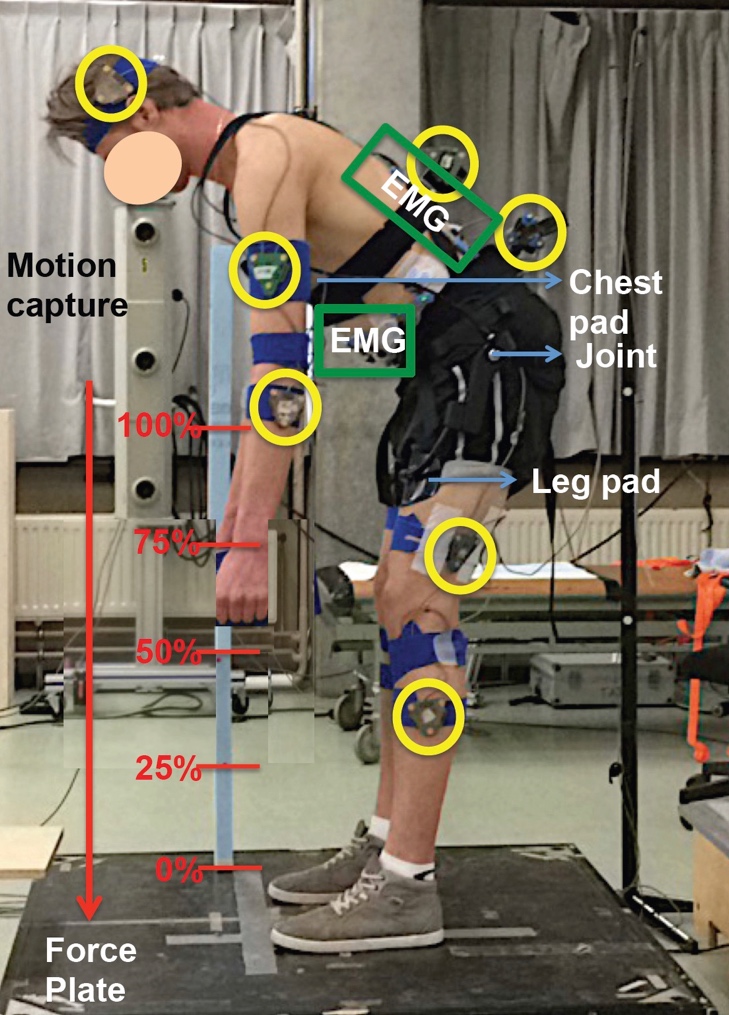
We assessed to what extent a benchmark exoskeleton reduces spine loading and changes body kinematics during static trunk bending and during lifting. Additionally, we investigated how it affects perceived comfort, effort, performance, and metabolic energy consumption during functional activities such as walking and stair climbing. Based on these data, biomechanical requirements for the spexor passive exoskeleton were refined.
Monitoring system runs with full body model
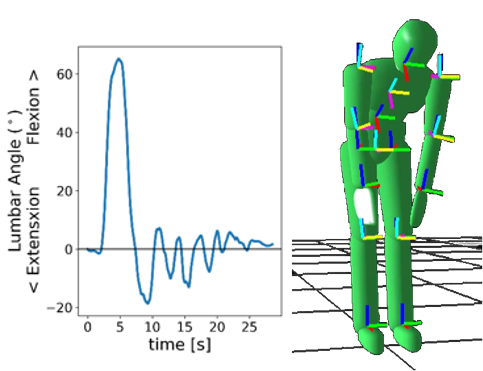
The SPEXOR monitoring system is now linked with the full-body dynamical model providing insight into the musculoskeletal stress parameters. Further optimization for real-time processing and feedback are being addressed.
Controller for passive spinal exoskeleton
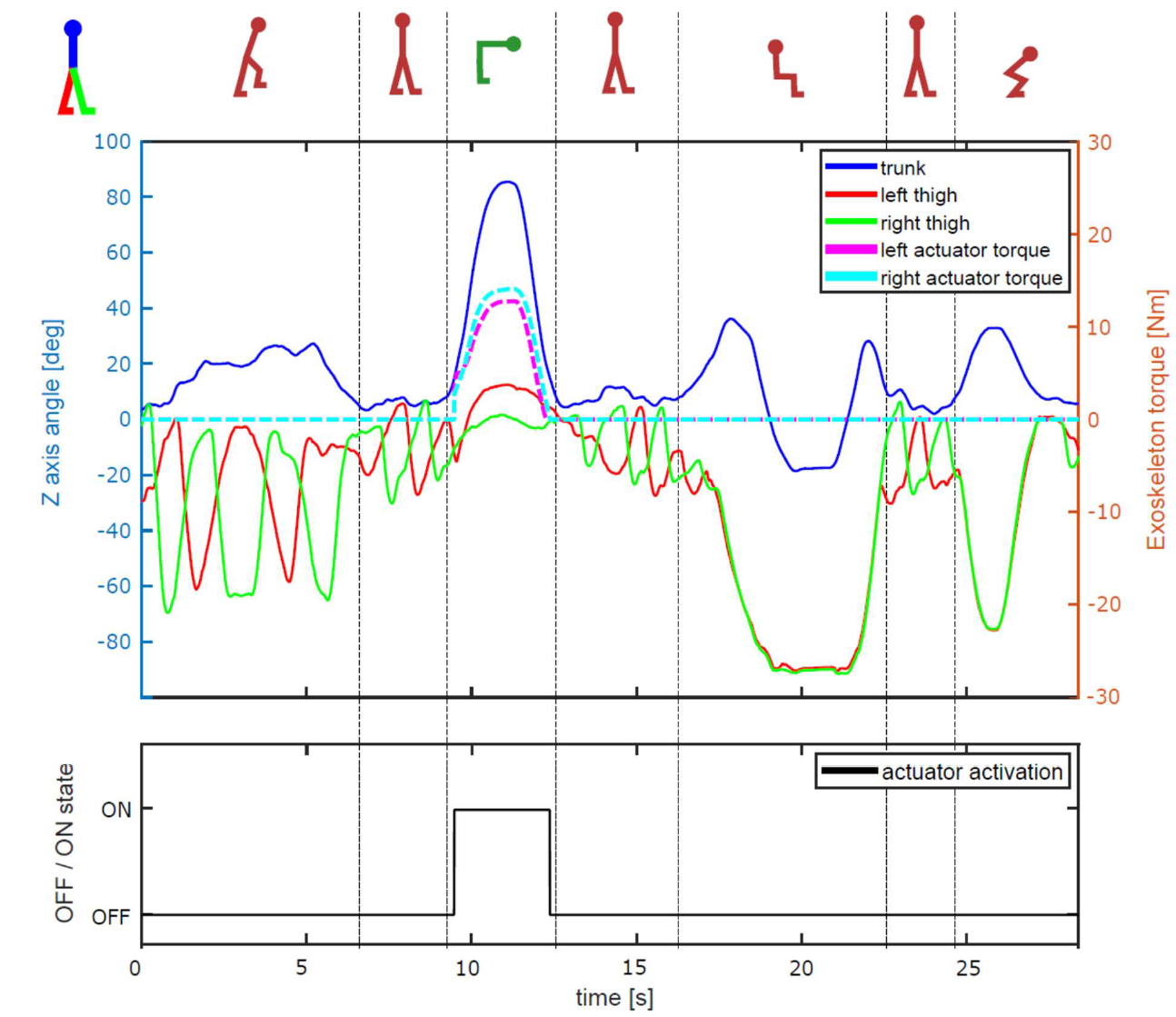
The controller for engagement and disengagement of the hip spring is developed. It is based on the probabilistic model of the human motion that classifies whether the user requires the support of the exoskeleton or the exoskeleton should remain disengaged to allow free motion.