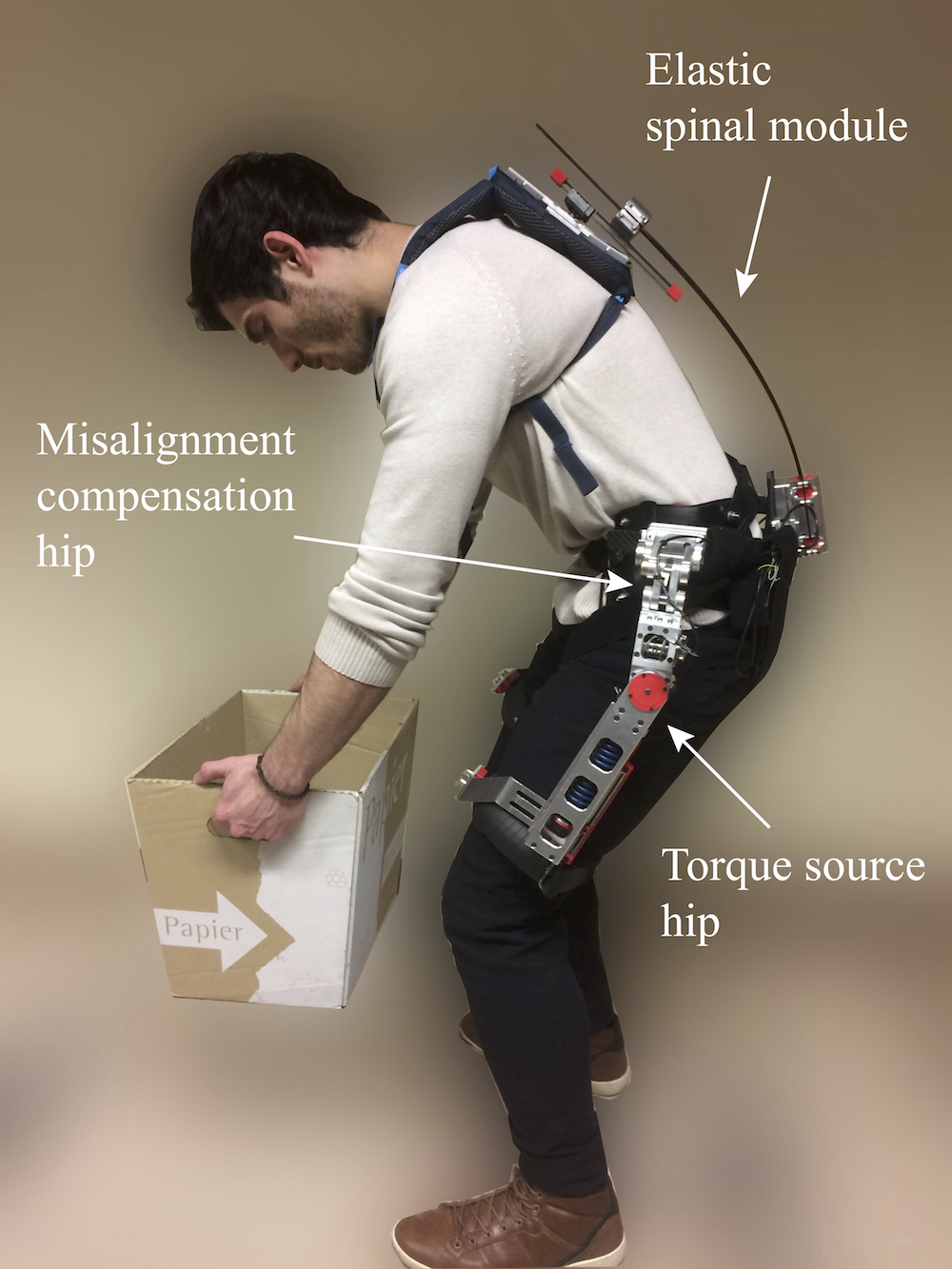
Passive spinal orthosis with viscoelastic element
Continuus carbon fiber beams which generate support and allow for a large range of motion are used as a back interface. Combined with the torque source at the hip, they generate the torque which reduces the strain on the lower back.