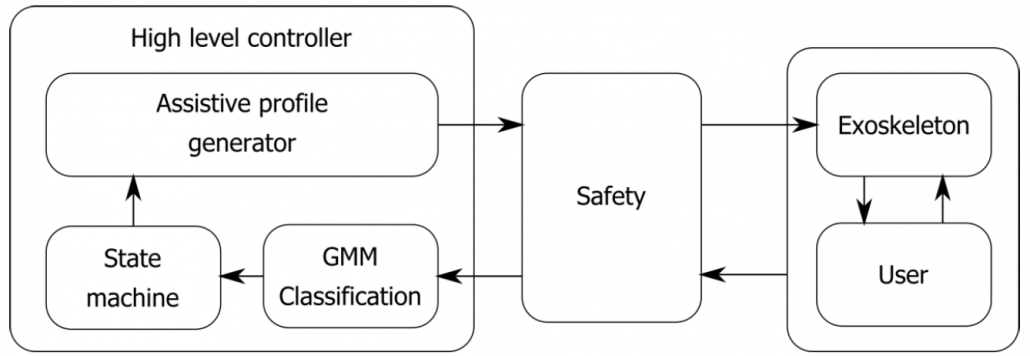
The control concept for active exoskeleton is based on a probabilistic model to determine the state of the system.
Based on the probabilistic state classifiers the high-level controller determines the appropriate assistive torque profile. The assistive torque profile is the resulting combination of a passive and active torque source.