
High-level exoskeleton control formulated
Based on the meeting between JSI, UHEI and VUA in Amsterdam in October 2016 we formulated a high-level control architecture of the spinal exoskeleton. The architecture will be implemented as a multi-layered system with reactive and model based controllers to meet the necessary ergonomic requirements for LBP prevention and treatment.
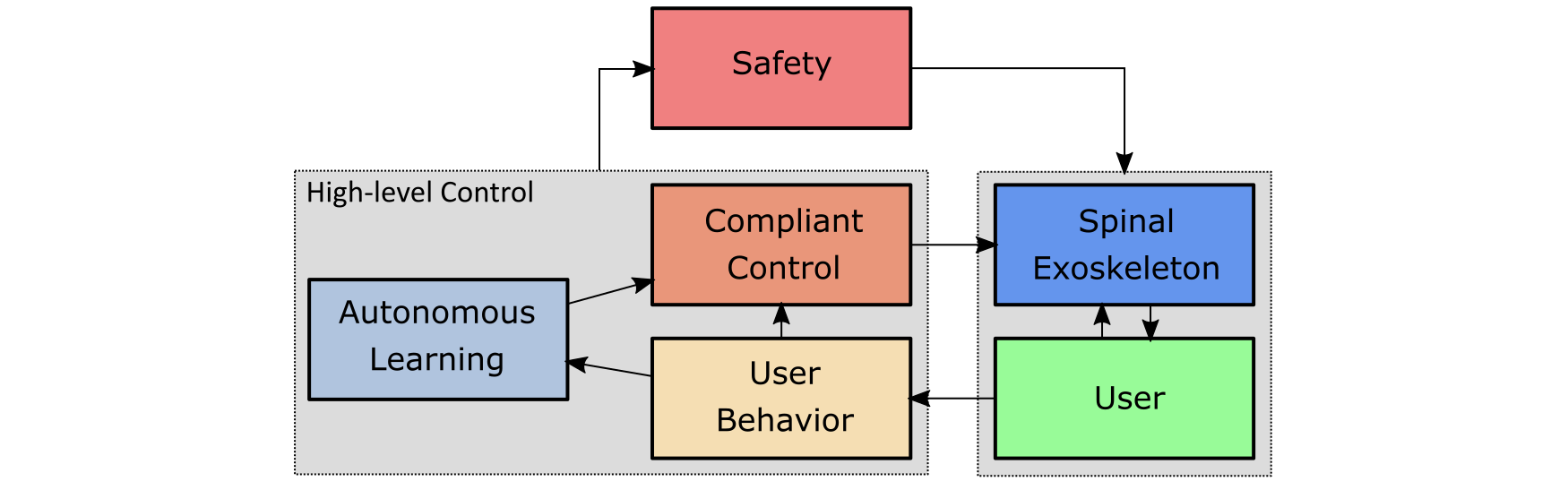
Control framework of spinal exoskeleton